Showing 1–16 of 4571 results
-
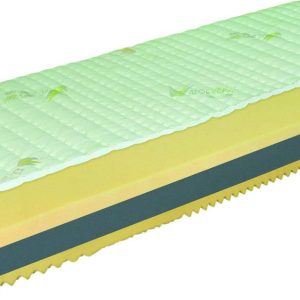
Materasso Termopur Comfort 140X200
1,359.00zł -

Aldex Dione 6 Lampa wisząca chrom 1092K4
1,119.00zł -

New Design Ł Tapicerowane Quaddro Double
1,998.00zł -

Ekodom Łóżko Glamour Drewniane 160X200 Wiśnia Szuflada 1 2 Długości
3,786.00zł -

New Design Łóżko Lazio 160X200 Bez Pojemnika Grupa Iv
3,176.00zł -

Lampa Fabbian Cubetto D28G03-00
559.00zł -

Ekodom Łóżko Drewniane Lulea Olcha Naturalna 180X200 Szuflada 2/3 Długości
3,362.00zł -

POLUX TUYA PASEK WI-FI 2M 3000K+6000K+RGB IP65 313898
180.50zł -

Sanico Il Mio Pajączek Polux (312921)
188.00zł -

Candellux Oprawa Natynkowa Tuba Ip20 Śr 68 Cm Biała Led (2273624)
70.29zł -

Philips Led S14S 500Mm 4,5W (60W) 375 Lm (78950500)
49.75zł -

Italux Restenza E27 Miedziany (Pnd24391Cop)
186.00zł -

Lampa Zuma Line One W046102Ef7F7 Złoty (12780722000000012)
319.00zł -

Janpol Wenus 120X190
898.00zł -

Orlicki Design Lunga Old Gold (Lungaoldgold)
689.00zł -

Cama Meble Łóżko+ Stelaż C8 90X200 Coco Dąb Sonoma 716208
921.00zł